

【施羅德工業】關于管廊巡檢,我這有個完美方案想推薦給你
城市綜合管廊
囊括了城市內的
燃氣、熱力、電力、供水、排水、通信等
管線及其附屬設施

它深埋地下,默默無聞,保障城市運行
作為市政基礎設施的重要組成部分
它在現代化城市發展中
發揮著無可替代的作用

但是,隨著城市的發展擴張
綜合管廊的長度也逐漸增加、規模不斷擴大
傳統的綜合管廊運營管理問題逐漸凸顯
管廊內往往光線不佳、空氣不良、結構復雜
給人員巡檢帶來了不小難度
方案一:人工巡檢

能夠發現問題并及時解決 | √ |
采集信息不全面、不系統 | × |
受人員技能、經驗等影響 | × |
不能及時反饋信息 | × |
有火災、泄漏等風險 | × |
方案二:監控系統檢測

機器自動運行方便快捷 | √ |
信息采集比較全面 | √ |
占用電纜多 | × |
存在監控死角 | × |
需要監控頭數量多 | × |
想要快捷方便,減少人工,降低成本
又要系統檢測、及時反饋、無死角巡檢……
兩全其美!
怎么辦?
那就請看方案三吧
方案三
施羅德工業集團自主研發的
USR全域穿梭機器人
USR全域穿梭機器人
主要針對當前城市綜合管廊建設里程日益增加
以及其所衍生出來的:安全巡檢、巡邏監控、預警預防、大數據分析等需求。

USR全域穿梭機器人具備“集群化、平臺化、自動化和智能化”四大優勢特點。
USR全域穿梭機器人徹底拋棄地面上運行的輪式巡檢機器人的想法,結合管廊的特點,合理利用管廊上部空間,采用掛軌式布局,極大適應管廊工作條件,定位精度高,具有觀測用多關節機械臂,觀察范圍更廣。
系統結構
USR全域穿梭機器人主要由機器人車體系統、路基系統、控制調度平臺組成。
其中機器人車體系統又可分為:

按各模塊功能,將機器人本體硬件部分又分為三個功能艙:
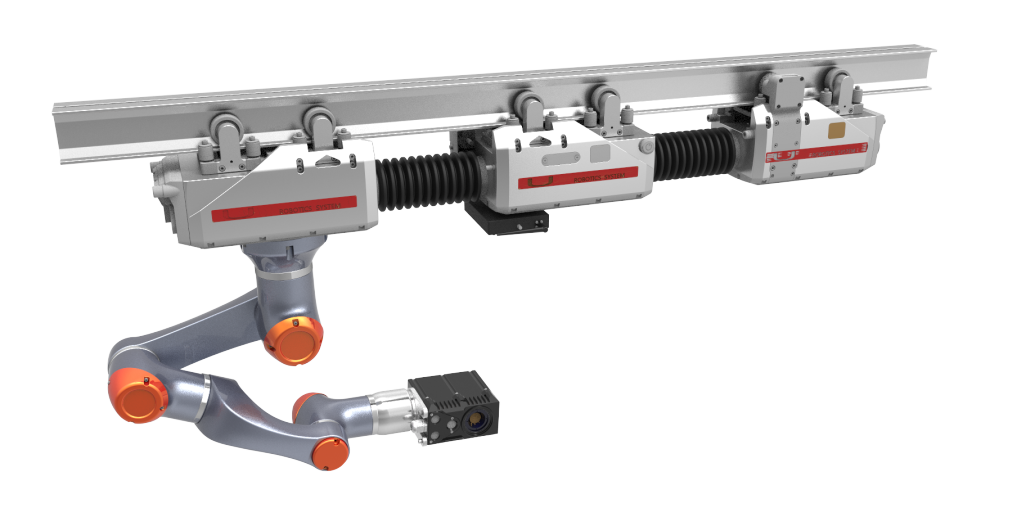
控制艙——機器人的主控中心,其中集成了位置檢測傳感器,避障傳感器,環境傳感系統及通訊系統等,為機器人運行提供安全保障。
動力艙——機器人的能源供給模塊,為機器人提供牽引動力,并集成了電源管理系統、自主充電系統等。
搭載艙——機器人搭載高靈活性的多關節機械臂和高清數字影像系統,將管廊內的關鍵圖像、視頻信息無死角地完美采集。同時還可搭載滅火裝置可以防火災于未然。
巡檢過程

雄安新區市民中心綜合管廊USR巡檢機器人投入使用
機器人由動力艙提供能源動力,在控制艙的控制下,經動力艙牽引,在綜合管廊內鋪設好的軌道上進行巡檢。
通過平臺設置多種巡檢模式,巡檢中搭載艙機械臂將自動伸出,快速對管廊進行全方位圖像采集和傳感器數據采集,然后經由通訊系統將采集的實時圖像數據上傳至后臺終端處理、分析,并作出及時預警危險信息,同時和泵站、風機、電力系統等設備聯動。
運行當中,環境傳感系統會將管廊內溫度、濕度、氧氣、易燃易爆有毒有害氣體數據實時分析并上傳后臺存儲、分析及報警。
技術優勢
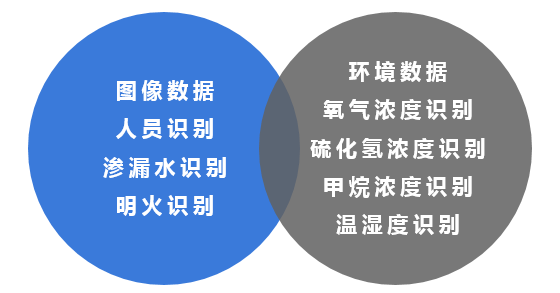
USR全域穿梭機器人,為綜合管廊巡檢的實際使用而設計,擁有先進的圖像識別技術,能夠處理多種圖像識別任務,如準入人員的識別及追蹤,可以使監護者更加有效地在管廊外,對管廊中的人員進行跟蹤監護,并可對違規行為進行輔助報警。
大數據聯動 分析能力強
機器人還具有環境監測系統的大數據聯動功能,機器人在整個管廊中不間斷的對環境數據進行采集,并回傳給后臺數據庫,通過對數據的整理和處理,可以對管廊中的溫濕度、有毒有害氣體等的變化作出分析,繪制變化趨勢圖,并可預測存在的潛在風險,可幫助監護者及時提醒廊內工作人員潛在危險,或對人員進行疏散。
一體車巡檢機器人
模塊化設計 應用范圍廣
采用模塊化設計,機器人各艙便于拆裝,可以根據需要更換艙室、傳感設備甚至是懸掛部件。在更換相應的觀測設備后,結合圖像識別技術,機器人可以用于監獄、國防重地、危險品倉庫、道路、地鐵、隧道等各種可使用掛軌式機器人的場景。
多艙位聯動 拓展性能好
模塊化組合多艙設計,提高機器人的擴展性,結合環境識別,圖像識別技術,機器人可以在廊內失火,有毒有害氣體泄露等突發險情時,通過無阻礙的機器人專用軌道,掛載機器人用輔助消防設備,救援設備等,對管廊、人員實行第一手救援,并進行險情的第一手控制。由于機器人對水淹、毒害、高溫的耐受性,可以身處險情中心匯報最真實的情況,便于救援工作高效展開。
施羅德工業集團致力于為城市提供
完整“地下空間解決方案”

四川省成都市武侯區世紀城路198號







Copyright ? 2019-2024, www.zjnhdd.cn,all rights reserved 版權所有 廊坊國際管道會展有限公司 冀ICP備15014260號-1